Invented by Noh; Mi Rim

Self-driving cars are changing how we see the road. But for these vehicles to be safe and reliable, they must understand their surroundings with great accuracy. Today, we will explore a breakthrough patent that takes a giant step toward making autonomous vehicles smarter and safer. This patent focuses on how a car uses LiDAR (a kind of sensor that sees the world with light) to find, track, and decide which objects around it are important. Then, the vehicle uses this information to drive itself more safely.
Background and Market Context
In recent years, the dream of self-driving cars has grown quickly. Companies like Tesla, Waymo, and many others are putting billions into making cars that can drive themselves. These cars promise to lower accidents, help people who cannot drive, and change how we use transportation. But there is a big problem: how does a car truly know what is around it? How can it tell the difference between a parked truck, a moving bicycle, or a person crossing the street?
Autonomous cars use many kinds of sensors. Cameras can see things like stop signs and traffic lights. Radar can measure how far away things are, even in the dark or fog. LiDAR is another important piece. LiDAR works by shooting out tiny beams of light and measuring how long it takes for the light to bounce back. By collecting this data, LiDAR builds a 3D map of the world around the car. Each point in this map tells the car how far away something is. When the car’s computer puts these points together, it creates shapes and outlines (called “contours”) of objects.
But just having all these points is not enough. The car needs to group them into meaningful objects: a person, another car, or a tree. To do this, the computer draws imaginary boxes around each object—these are called “virtual boxes” or “bounding boxes.” The car then needs to decide which box is the most important right now. Maybe it is the car in front, a bicycle approaching from the side, or a dog running across the road. Making the right choice is critical for safety.
As autonomous vehicles get better, so do the expectations of safety from regulators, insurance companies, and the general public. Any mistake—a wrong guess about what an object is or what it will do—could lead to an accident. That is why patents like this one matter so much. This invention sets out to improve how the car’s brain sorts, checks, and uses sensor data to control the vehicle in a way that is much more accurate and reliable than before.
The market demand for robust object detection and tracking is huge. As more cities open up pilot programs for self-driving taxis, and as car makers push toward higher levels of automation, the need for smarter vehicle control systems grows. This patent fits right into this need. It focuses on solving problems that have real-world consequences, making it a key piece in the race to full autonomy.
Scientific Rationale and Prior Art
Let’s take a closer look at the science behind this invention. LiDAR, as we explained, builds a “point cloud”—a set of dots that show where objects are. The next step is to group these points into objects. Traditional methods often struggle with accuracy. Sometimes the car thinks two objects are one, or it misses an object completely. Sometimes, changes in lighting, weather, or sensor noise cause confusion. Another challenge: objects are moving. The system must track not just where things are, but where they are going.
Before this patent, many systems relied on simple bounding boxes to surround detected objects. The box is like a fence drawn around the group of points the sensor finds. The car’s computer then uses the size, position, and movement of the box to decide how to act. But there are some big problems with this approach:
First, the boxes are often “static”—that is, once they are drawn, the system does not update them very well as things move. If an object changes direction or speed, the box may not keep up. Second, noisy data can cause the system to create boxes that do not match the real object. For example, if rain or fog causes extra points, the computer might think an object is bigger or shaped differently than it really is. Third, most systems use only one way to check the box—usually the size or position. If this check fails, the car might ignore an object or react too late.
Some prior art tried to address these issues. For example, some systems used filters to smooth out noisy data. Others tried to use multiple types of sensors (like radar and camera together) to cross-check their guesses. But these solutions often fall short when objects are moving quickly, when there are lots of objects close together, or when the car itself is turning or changing speed. In these cases, the system might lose track of important objects, or worse, make a wrong guess about which ones matter most.
This patent builds on a few important scientific ideas:
1. Using multiple “coordinate systems.” Instead of checking object position in just one way, the system looks at the object from more than one angle. It creates a coordinate system centered on the object itself, and another centered on the group of points that outline the object (the “contour points”). This helps the system better understand an object’s real position and movement, even if the sensor data is messy.
2. Checking “distributions” of contour points. Rather than just making a box, the system pays attention to how the points are spread out inside the box. Is the object long and thin, like a bicycle? Or short and wide, like a stopped bus? By analyzing this spread in both coordinate systems, the system can spot mismatches that might signal an error.
3. Validating boxes over time. The system does not just look at a single frame (a snapshot in time). It checks how the direction and position of the box change over several frames. If an object’s heading (the way it is pointing or moving) jumps around too much, the system knows something is wrong—maybe the data is noisy, or the object changed direction suddenly.
4. Using “hysteresis” for stability. Hysteresis is a fancy word for remembering past states to avoid flip-flopping decisions. If an object’s heading direction keeps changing a little bit, the system does not jump to a new decision right away. It waits to see if the change is real, making the tracking more stable.
5. Outputting only the most reliable boxes. After all these checks, the system decides which objects are “of interest” and only sends these to the car’s brain for further action. This reduces the risk that the car will make a bad decision because of a false or noisy detection.
No other system before has put all these pieces together in quite this way. By combining multi-system checks, time-based validation, and smart filtering, this patent sets a new standard for how autonomous vehicles can safely and reliably see the world.
Invention Description and Key Innovations
Now, let’s break down what this patent actually does, step by step, in simple words. The invention is a smart apparatus (a combination of a LiDAR sensor and a processor) that helps an autonomous vehicle decide which objects around it matter the most and then controls the car based on this information.
Here’s how the system works:
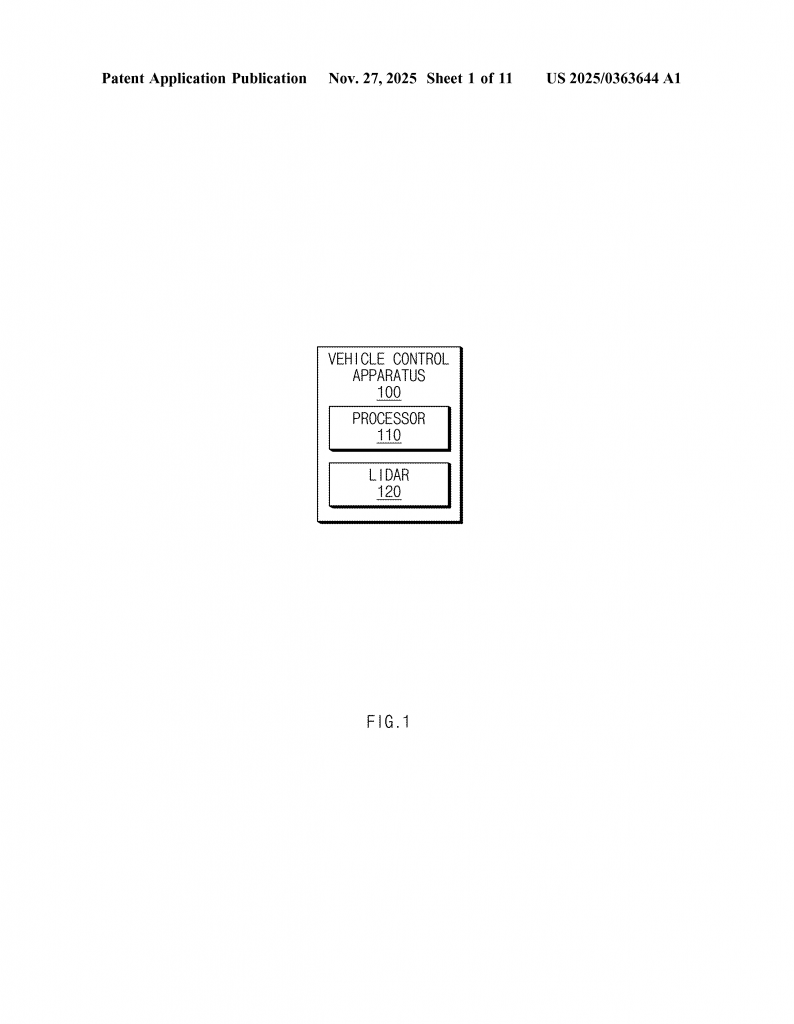
The LiDAR sensor looks at the world and creates a 3D point cloud. The processor groups these points into “virtual boxes,” each box representing a possible object nearby—a car, a bike, a person, and so on.
Next, the processor decides which of these boxes is the most important—the “interest virtual box.” This decision is made based on several things: how the car is moving (straight or turning), where the object is (in front, on the side, close or far), and how big the box is (which tells the type of object).
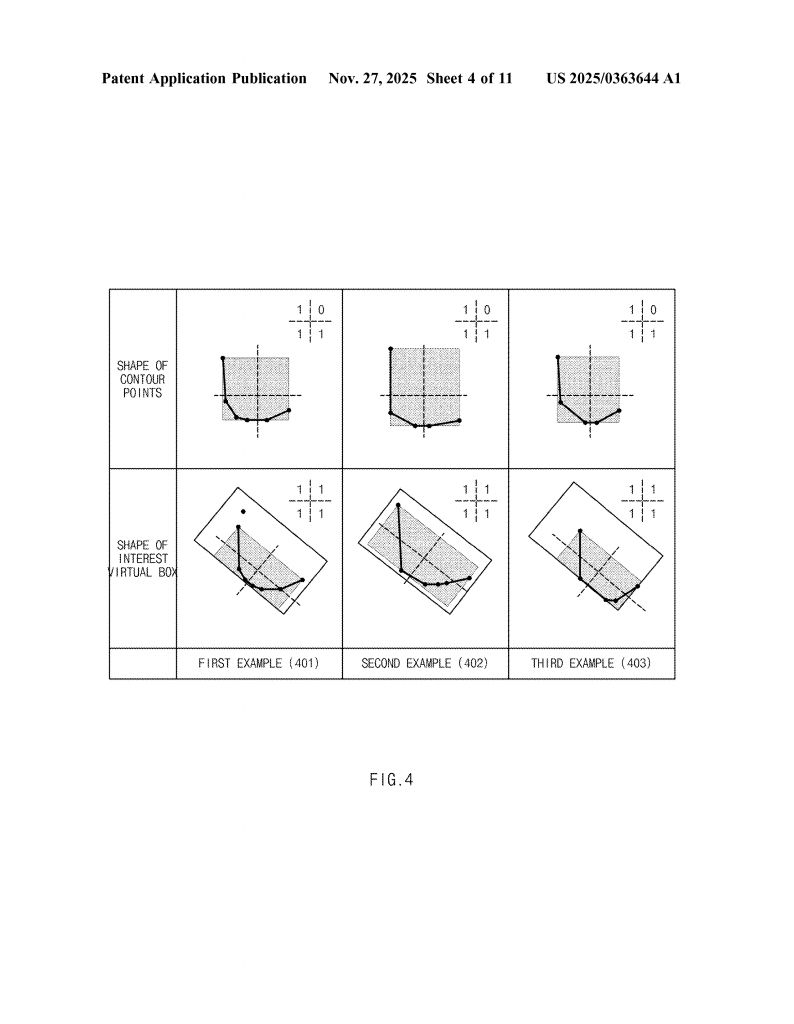
Once the interest box is picked, the processor looks at the “contour points” of the box. These are the points that outline the object’s shape. It does this in two ways:
1. The first way centers the coordinate system on the interest box itself. This helps understand the object in a way that follows its movement and orientation.
2. The second way centers the coordinate system on the contour points. This gives another viewpoint, helping double-check the object’s real position and shape.
The processor then checks the “distribution” of these contour points in both systems. If the shape or spread of points does not make sense—if, for example, the box is too wide for a bicycle or too short for a truck—the system can spot a mistake.
After these checks, the system validates the interest box against a set of rules:
– Does the box’s heading (the direction it points or moves) stay steady over time? If not, it may be a false detection.
– Does the size and position of the box change in a way that matches how real objects move? If the object suddenly jumps or changes direction without reason, the box may be wrong.
– Is the object moving in a straight line or following a known path? If not, it may be noise or something not relevant for driving.
– Are all the contour points matched up in both coordinate systems? If there is a mismatch, the box is flagged as unreliable.
If the box passes all these checks, the processor “outputs” the box—this means it tells the car’s main brain, “Pay attention to this object.” The car then uses this information to steer, brake, or make other driving decisions.
A special feature of this patent is its use of “layers.” The processor slices up the 3D space around the car into flat planes (like slicing bread). It then checks the spread of contour points in each layer. This helps catch objects that are tall (like trucks) or low to the ground (like animals or road debris).
Another clever part is how the system uses “hysteresis,” or memory, to avoid overreacting to small changes. For example, if a box’s direction flickers a little because of sensor noise, the system waits before deciding that the object has really changed direction. This makes the car’s response smoother and more stable.
Finally, the system tracks how objects move over time. If a box’s heading changes more than a certain angle (say, 20 degrees) from one frame to the next, the system may ignore the box for now, thinking it might be a false detection. But if the box stays stable, it is more likely to represent a real object that the car should care about.
Let’s look at a simple example. Imagine your self-driving car is going straight down the road. The LiDAR creates boxes for all the objects it sees: another car ahead, a bicycle on the side, and a parked truck on the sidewalk. The processor checks each box:
– The car ahead is moving in the same direction, its box is stable, and its heading does not change much. The system outputs this box—the car needs to pay attention.
– The bicycle is moving, but its box is thin and long, matching the expected shape. The heading is steady, so the box is output.
– The parked truck is not moving. Its box is big, but the system can tell it is not in the road and is not moving, so it may ignore it for now.
– If a noisy point cloud creates a false box (maybe due to a puddle or flying debris), the system will likely flag it as unreliable and not output it.
Now, let’s talk about why this matters. Every second, the car must make hundreds of decisions about what to do next. If the system is fooled by noise, or if it misses a real object, the results can be dangerous. By doing all these checks—across layers, over time, and in multiple coordinate systems—this invention makes sure only the most reliable information is used to steer, brake, or accelerate the car.
This system is also very flexible. It can be used in many types of vehicles, from small city cars to big trucks. It can work with different kinds of sensors, not just LiDAR, and it can be updated over time as new sensor technologies come out.
For developers and companies working on self-driving technology, this patent gives a clear, practical way to improve object detection and tracking. It combines easy-to-understand ideas (like checking shape and heading) with smart technical features (like using multiple coordinate systems and hysteresis). The result is a system that is both robust and adaptable to real-world driving.
In summary, the key innovations of this patent are:
– Using both object-centered and contour-centered coordinate systems to get a complete picture of each object.
– Checking the distribution of contour points in multiple layers for better 3D understanding.
– Validating objects over time, not just in one snapshot, for better stability.
– Using hysteresis to avoid overreacting to small or noisy changes.
– Outputting only the most reliable boxes, so the car focuses on what matters most.
These ideas work together to create a safer, smarter, and more accurate vehicle control system, one that is ready for the real world.
Conclusion
The road to safe and reliable autonomous driving is full of challenges, but patents like this one move us closer to the dream. By rethinking how a vehicle detects, checks, and tracks objects around it, this invention solves many real-world problems that older systems could not handle. It uses simple, effective checks in multiple coordinate systems, tracks changes over time, and makes sure the car only acts on the most trustworthy information.
As the market for self-driving cars grows, and as demands for safety increase, this kind of technology becomes even more important. Whether you are a developer, an engineer, or just someone interested in the future of transportation, understanding these innovations helps you see how the next generation of vehicles will keep us all safer on the road. Keep an eye on this space—patents like this are laying the groundwork for the cars of tomorrow.
Click here https://ppubs.uspto.gov/pubwebapp/ and search 20250363644.