Invented by Schmarje; Lars, Zhang; Dan
Artificial intelligence is changing the way machines see the world. But teaching computers to spot every object—especially ones they’ve never seen before—is still tough. A new patent application aims to solve this by making object detection smarter, safer, and more reliable. In this article, we’ll walk you through the background that led to this invention, the science and earlier solutions behind it, and then break down how this new approach really works. Whether you’re an AI developer, tech leader, or just curious about how machines learn to “see,” this guide will make it all easy to understand.
Background and Market Context
Every year, more companies are putting smart technology into vehicles, robots, and security systems. These machines need to understand their surroundings to work safely—especially when they’re moving, like self-driving cars or delivery robots. Cameras and other sensors help them look around, but the real magic happens in the software that decides what’s in those pictures. That’s where neural networks come in.
Neural networks are like very simple brains for computers. They learn by looking at lots of pictures and being told what’s in each one. Over time, they get better at spotting things like people, cars, or pets. This is called image classification and object detection. It’s a big deal for safety: a self-driving car must spot a pedestrian every time, not just most of the time. Missing something could lead to an accident. Seeing a ghost object that isn’t there (like a shadow or a painted line) could cause a sudden stop for no reason, which is also dangerous.
But here’s the problem: these networks are only as good as the examples they’ve seen. If a car’s camera spots something new—like a couch that fell off a truck—it might not realize it’s an obstacle. Or, it might think a shadow is a real object. This is a huge problem for safety. The market wants smart systems that not only spot known things, but also flag anything that might be dangerous, even if it’s never been seen before. People want fewer false alarms, but also zero missed dangers.
With more robots in factories, more cars with self-driving features, and more cameras watching public spaces, the need for reliable and smart object detection is growing fast. Companies want to avoid expensive mistakes, lawsuits, or even life-threatening situations. That’s why inventors are racing to build better, safer, and more flexible AI systems for object detection.
Scientific Rationale and Prior Art
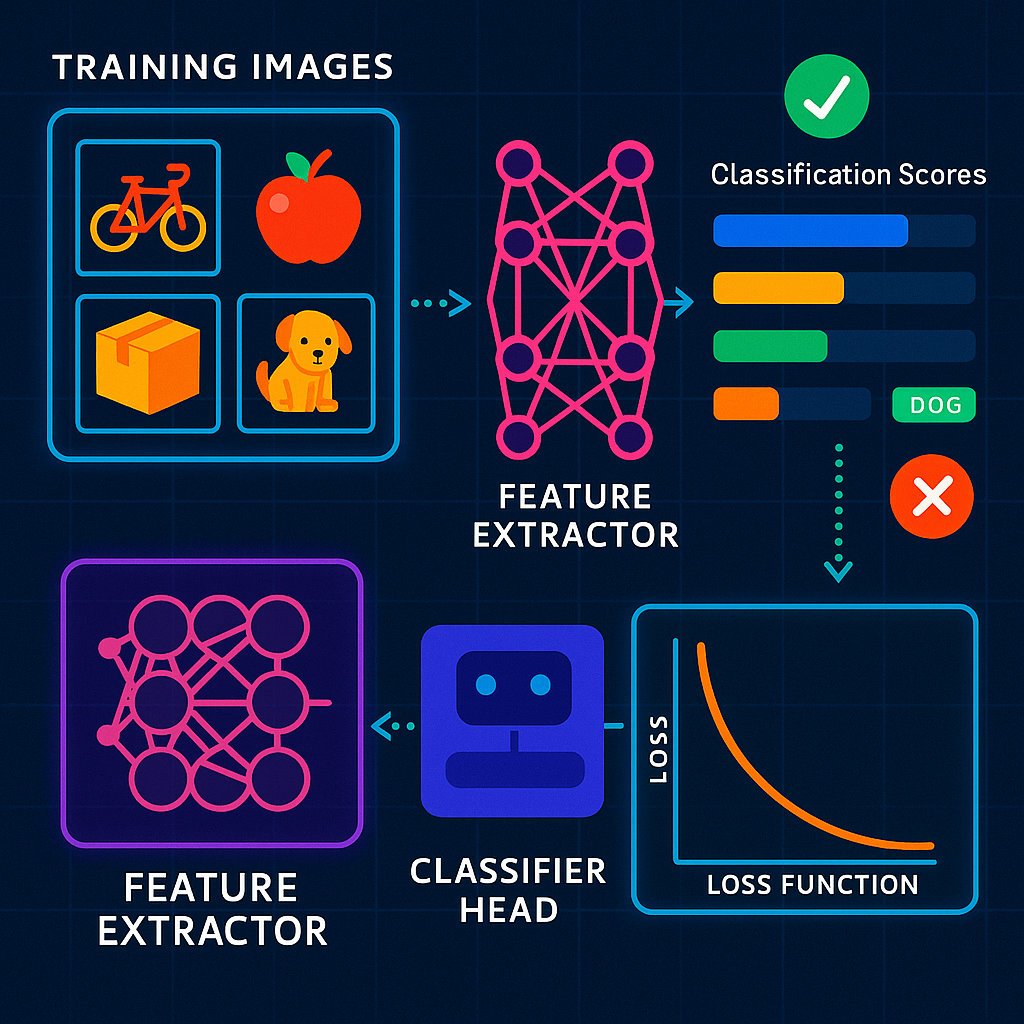
The science behind object detection is always evolving. At its heart, a neural network learns from examples. During training, it looks at lots of images, each labeled with what’s in it. The network tries to guess what’s there, and each time it’s wrong, it gets a small “penalty.” This penalty is called a loss function. The network keeps adjusting itself to get fewer penalties, becoming better over time.
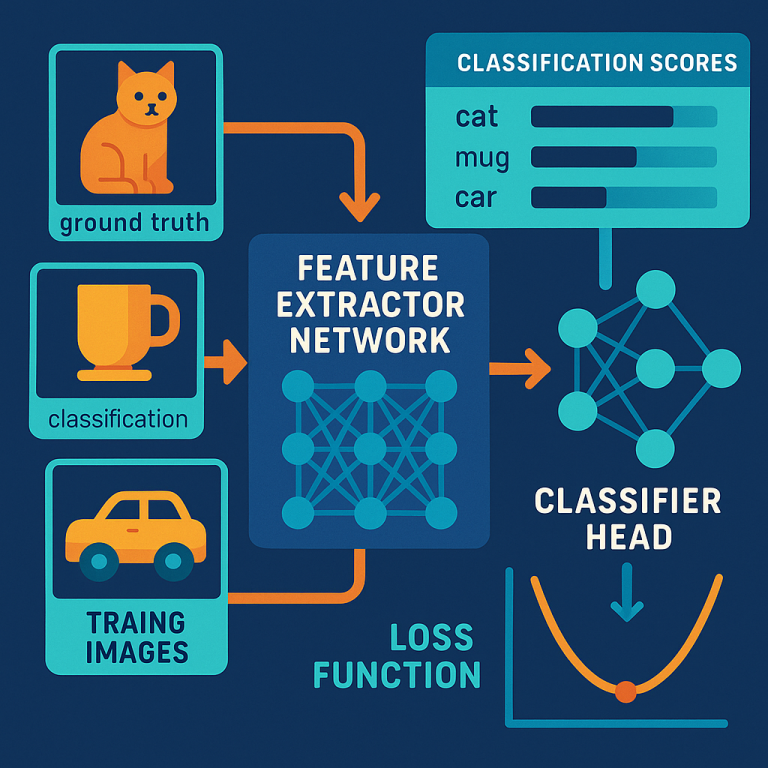
Most common object detectors have two main parts. First, a feature extractor looks for patterns in the image (like colors, edges, or shapes). Then, a classifier tries to decide what those patterns mean—like “this is a person” or “that’s a car.” Some advanced detectors also try to draw boxes around each detected object (bounding boxes), showing exactly where it is.
Earlier solutions have done a good job with known objects. They use lots of labeled data to get very good at spotting things they’ve seen before. But they have a big blind spot: unknown or unusual objects. When the network sees something new, it often either ignores it or guesses wrong. Some solutions try to fix this by adding an “unknown” class, so the network can say “I don’t know.” Others use extra systems to spot weird or out-of-place objects (anomaly detection). But these fixes have problems. Adding an “unknown” class might not work well if there aren’t enough examples. Anomaly detection can slow down the system, which is bad for things like self-driving cars that need to act fast.
Another issue is the balance between catching everything (high recall) and not crying wolf (low false positives). If a system is too eager, it might spot things that aren’t there—like shadows or road paint. If it’s too careful, it might miss real dangers. Prior art often struggled to get both right at once.
Some new research uses extra clues, like depth information from sensors, to double-check if an object is really there. Others add more complex loss functions, trying to teach the network not just to classify, but also to judge if something is “object-like” (objectness). But these methods either slow things down, require more hardware, or don’t generalize well to new situations. The market needs a solution that is fast, works on many types of objects (even new ones), and doesn’t need lots of extra resources.
Invention Description and Key Innovations
This patent application introduces a fresh way to train neural networks for object detection that solves the above problems. Here’s how it works, in simple terms:
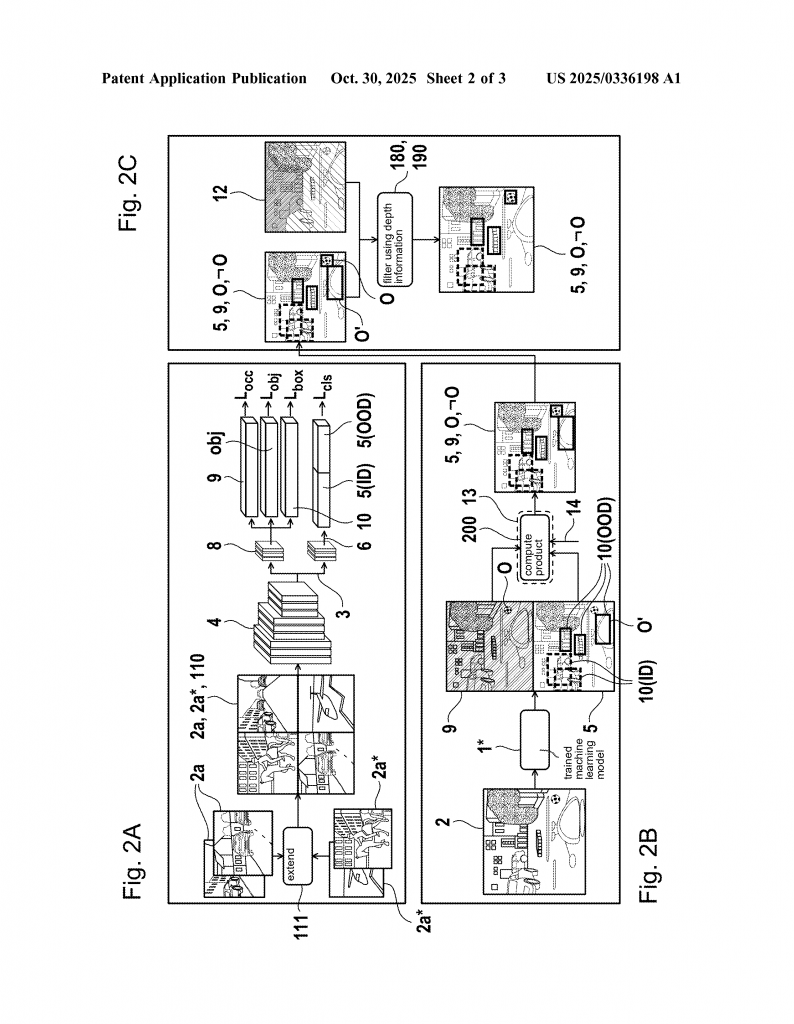
The invention teaches a neural network to look for objects using two separate clues. First, it still learns to classify known objects, just like before. But now, it also learns “objectness”—the sense that something, anything, is there, even if it doesn’t know what it is. This is done using a new “objectness head” in the network, trained to be independent of class. This way, the network can say, “I see something, but I’m not sure what it is,” instead of just guessing or ignoring it.
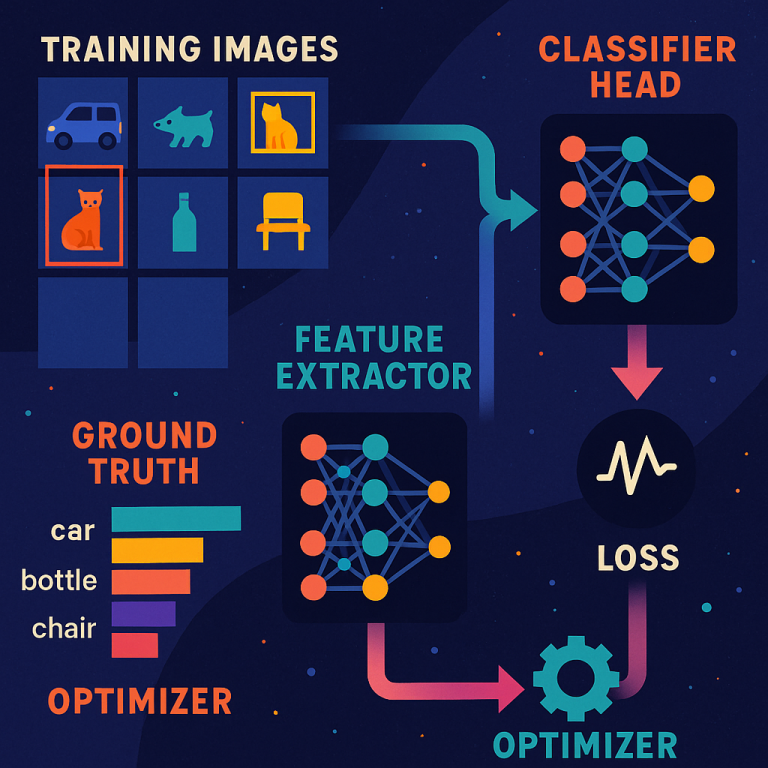
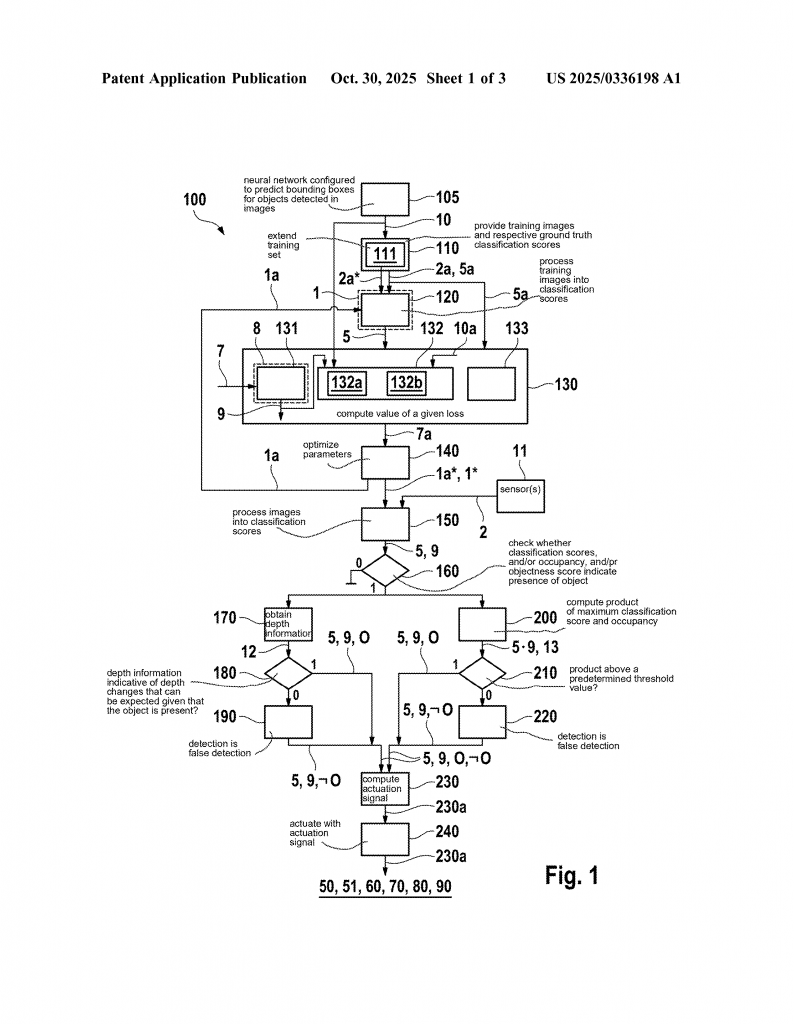
The process starts with lots of training images, some labeled with known objects, and some with things the network hasn’t seen before (out-of-distribution, or OOD, objects). The network looks at each image, extracting features (the patterns and details). It then makes two predictions: what class the object is (if any), and how confident it is that something is there at all (objectness or occupancy).
The magic happens in the loss function. This is the part that tells the network how well it’s doing, and where it needs to improve. In this invention, the loss function combines two parts: one for how close the class predictions are to the truth, and one for how well the network’s “objectness” matches what’s really in the image. The key is that the objectness part doesn’t care about class—it just cares if there’s something there. This teaches the network to spot both known and new objects, making it much better at catching surprises.
To make training smoother and faster, the invention also uses smart shortcuts. For example, when the network predicts bounding boxes (the drawn rectangles around objects), it checks how well these match the real boxes in the training data. To do this without lots of slow math, it uses a simple way to sum up overlapping areas, saving time. It also uses a measure called cross entropy to compare the expected and predicted objectness, making learning more stable.
Another clever trick is adding a special “unknown object” class. This lets the network say, “I see an object, but it doesn’t match anything I know.” This is very useful for real-world safety, since the system can alert a human or take safe action (like slowing down) when it spots something weird on the road.
After training, the network can do more than just spot known things. It can also flag anything that looks like an object, even if it’s never seen it before. When running in a car or robot, the network checks both its class prediction and its objectness. If both are high, it’s very sure. If only objectness is high, it knows something is there, but isn’t sure what. The system can then use extra clues—like depth sensors—to double-check. For example, if the image looks like there’s an object, but the depth map says the road is flat, the system can ignore the false alarm.
This approach means fewer missed dangers and fewer false alarms. The system can react in real-time, without needing lots of extra hardware or slowing down. This is perfect for cars, robots, medical systems, and security cameras—anywhere you need smart, safe object detection.
The invention even allows for smart actions based on what the network finds. If it’s sure there’s an object in the path, it can trigger a brake or steering maneuver. If not, it can keep going safely. The result is a system that’s smarter, faster, and safer for everyone.
Conclusion
This new patent application marks a big step forward in the world of AI object detection. By teaching neural networks not just to recognize known things, but also to sense objectness—the simple idea that “something is there”—it makes machines safer and more reliable. The clever mix of class prediction, objectness, and smart training tricks means fewer false alarms and fewer missed dangers. It keeps systems fast and efficient, without needing big computers or special hardware.
For anyone building or using AI in cars, robots, or cameras, this approach means better safety and more trust in smart machines. As the world gets more connected and automated, solutions like this will be key to keeping people and property safe. This invention shows how a small change in how we teach machines can make a huge difference in the real world.
Click here https://ppubs.uspto.gov/pubwebapp/ and search 20250336198.