Invented by Kai Ding, Khaled Refaat, Stephane Ross, Waymo LLC
As autonomous vehicles continue to advance in technology and become more prevalent on our roads, the need for efficient and effective decision-making algorithms becomes increasingly important. One crucial aspect of this is agent prioritization, which involves determining how an autonomous vehicle should prioritize its actions when faced with multiple potential courses of action.
Agent prioritization is essential for ensuring the safety and efficiency of autonomous vehicles. It involves making decisions about which actions to take in various scenarios, such as when to yield to pedestrians, when to change lanes, or when to merge into traffic. These decisions need to be made quickly and accurately to avoid accidents and ensure smooth traffic flow.
The market for agent prioritization for autonomous vehicles is expected to grow significantly in the coming years. According to a report by Allied Market Research, the global autonomous vehicle market is projected to reach $556.67 billion by 2026, with a compound annual growth rate of 39.47% from 2019 to 2026. As autonomous vehicles become more mainstream, the demand for advanced decision-making algorithms, including agent prioritization, will increase.
One of the key drivers of this market growth is the increasing focus on safety. Autonomous vehicles are expected to significantly reduce accidents caused by human error. However, to achieve this, they need to make split-second decisions that prioritize safety above all else. Agent prioritization algorithms play a crucial role in ensuring that autonomous vehicles make the right decisions in critical situations, such as avoiding collisions or responding to emergency vehicles.
Another factor driving the market is the need for efficient traffic management. As more autonomous vehicles hit the roads, it becomes crucial to optimize traffic flow and minimize congestion. Agent prioritization algorithms can help autonomous vehicles make decisions that not only prioritize safety but also consider factors such as traffic conditions, road infrastructure, and other vehicles’ actions. This can lead to smoother traffic flow and reduced travel times.
Several companies and research institutions are actively working on developing advanced agent prioritization algorithms for autonomous vehicles. These algorithms utilize various techniques, including machine learning, deep learning, and reinforcement learning, to train the vehicles to make intelligent decisions in real-time. Companies such as Waymo, Tesla, and Uber are investing heavily in research and development to improve their autonomous vehicle decision-making capabilities.
However, there are challenges to overcome in this market. One of the main challenges is ensuring that the agent prioritization algorithms are fair and ethical. Autonomous vehicles need to make decisions that are not only safe but also consider the well-being of all road users. For example, should an autonomous vehicle prioritize the safety of its occupants over pedestrians? Striking the right balance between safety and fairness is a complex task that requires careful consideration and ongoing research.
In conclusion, the market for agent prioritization for autonomous vehicles is poised for significant growth in the coming years. As autonomous vehicles become more prevalent, the need for efficient and effective decision-making algorithms becomes paramount. Agent prioritization algorithms play a crucial role in ensuring the safety and efficiency of autonomous vehicles, making them a key focus for companies and research institutions. However, ethical considerations and ongoing research are necessary to ensure that these algorithms make fair and responsible decisions on our roads.

The Waymo LLC invention works as follows
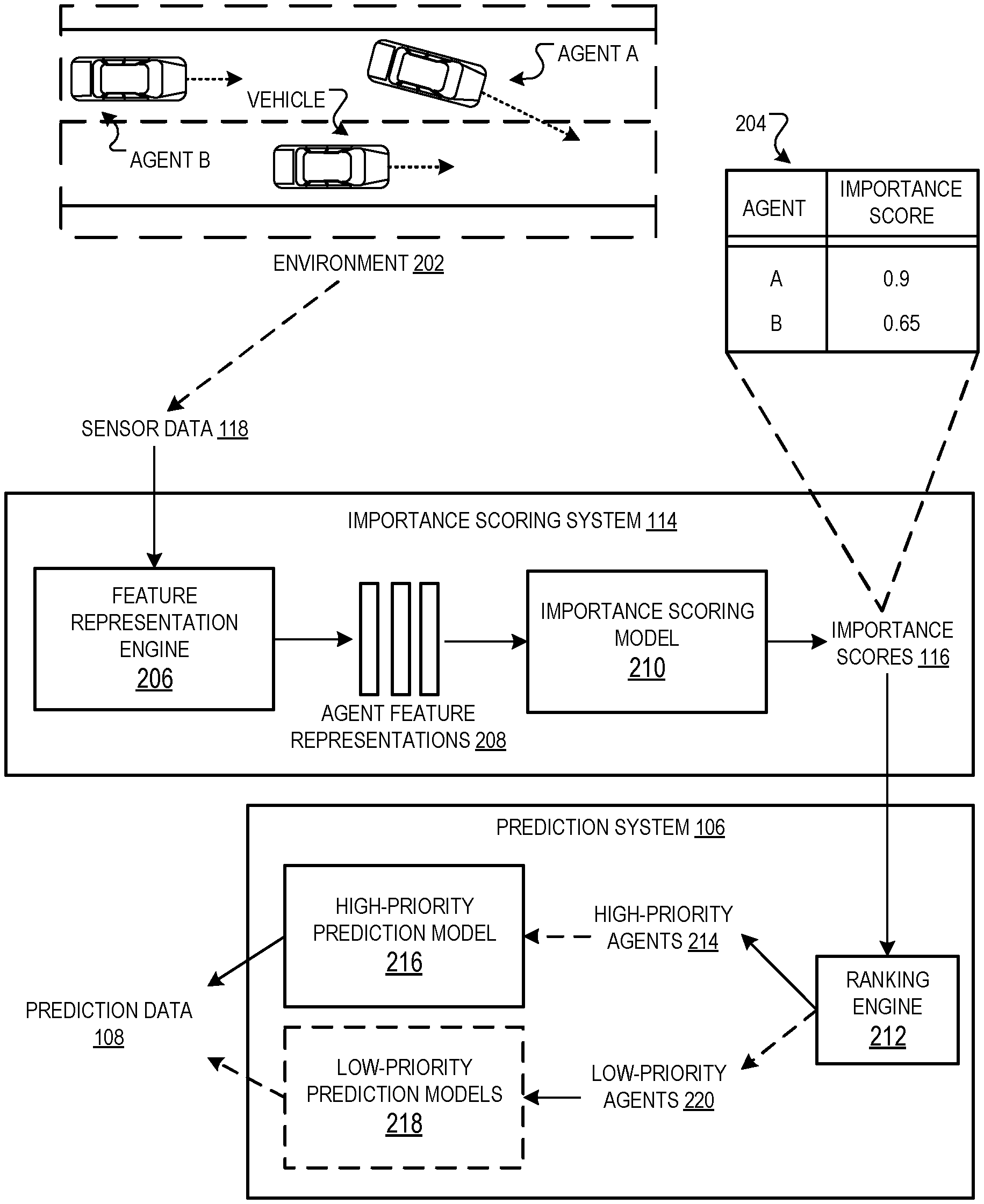
Methods and systems for identifying agents of high priority in the vicinity a vehicle, and for only those agents that are high priority, generating data characterizing agents using a prediction model. In one aspect, the system identifies multiple agent in an environment near a vehicle. The system calculates the importance of each agent by processing its feature representation using an importance scoring algorithm. The importance score of an agent is a measure of its estimated impact on the planning decisions made by the planning system for the vehicle, which plans the future trajectory of that vehicle. The system identifies a subset of agents that have the highest importance score as high priority agents.

Background for Agent Prioritization for Autonomous Vehicles
This specification is for autonomous vehicles.
Self-driving vehicles, such as cars, boats and planes, are considered autonomous. “Autonomous vehicles” use on-board computer systems and sensors to detect objects in the vicinity and make navigation and control decisions.
This specification describes a computer program onboard a vehicle which generates predictions for agents within a certain distance of the vehicle, based on estimated impacts on a vehicle’s planning system.
Accordingly to a first feature, a method is provided that can be performed by one or multiple data processing devices. The method comprises identifying multiple agents within an environment that is in proximity to a vehicle. The method includes generating a respective importance score for each of these agents. This involves, for each agent, processing a feature of an agent using an important scoring model to produce an importance score, wherein the significance score for the agency characterizes the estimated impact of that agent on planning decision generated by the planning system for the vehicle, which plans the future trajectory for the vehicle.
In some implementations identifying multiple agents within an environment near a vehicle may include identifying agents using sensor data from one or more vehicle sensors.
The method may include generating, using sensor data from one or multiple sensors on the vehicle, a feature representation for each agent. This feature representation can include, among other things, a velocity, acceleration, type, distance, and whether the predicted trajectory of an agent will overlap with the trajectory of a vehicle.
In some implementations, identifying a subset of agents that has the highest scores of importance as a high-priority agent includes identifying a certain number of those agents.
In some implementations, identifying a subset of agents that has the highest scores of importance as a high-priority agent includes identifying each agent in the plurality with a score of importance that meets a threshold.
The method may include: for agents not classified as high-priority, generating data describing the agents using a secondary prediction model. This second model will have a different number of parameters than the first model.
In some implementations, both the first and second prediction models are implemented using neural network systems.

The data describing the high priority agents generated by the first prediction system is provided to the planning systems of the vehicles to generate planning decisions that plan the future trajectory for the vehicle. This includes providing the data describing the predicted future behaviour of high-priority high-priority high-priority high-priority high-priority high-priority high-prioritized agents generated by the first prediction system to the planning systems of the vehicles to generate planning decisions that plan the future trajectories of the
In some implementations, the data describing the predicted future behavior is generated by generating, for every spatial location in the environment a probability that the agent occupies the spatial position at a time specified after the current time.
In some implementations, a method is provided that includes providing planning decisions for the future trajectory of a vehicle to the control system of the car. This allows the vehicle’s operation to be controlled.
In some implementations, the entire method can be performed on the vehicle.
The method includes: generating training examples where each training example contains: (i), respective feature representations for multiple given agents within a certain vicinity of a specific vehicle at a specified time, (ii), data defining the ranking of these given agents, in terms of their impact upon given planning decisions by a specific planning system that plans a trajectory for a future vehicle of this particular vehicle. Generating a training
In some implementations, the generation of training examples may include generating examples based on actual or simulated driving logs.
In some implementations of training the importance-scoring model to generate respective scores for given agents that are characterized by a given training sample and conform to a given ranking specified in the training example, includes: processing a feature representation of first agent described by the training example to produce a score of first importance; processing a feature representation of second agent specified by a given training instance to produce a score of second importance; determining a “loss” based on if the first score and second score conform to a given ranking
In some implementations, the planning decisions that plan the future trajectory for a vehicle are based on: (i), an action performed by the vehicle; and (ii), a specific agent located in a certain area around the vehicle. This triggers the planning system to make the planning decision.
In some implementations, the process of determining a ranking for the agents at a certain time point based upon the planning decisions made by the planners includes determining an individual planning score for each agent, based off of any actions that the agent takes to prompt the planners. Then, the ranking is determined based on their respective planning scores.
In some implementations, the training examples include feature representations for each agent detected by the object detection system on the vehicle.

In certain implementations, the ranking of given agents can be used to define: (i), a division of given agents into groups, each of which contains one or more agents; and (ii), for each pair comprising a group of first and second agents, whether given agents from the first group are more influential on given planning decisions.
![]()
Click here to view the patent on Google Patents.